ガイド撮影の実際
一例として、自分がガイド撮影を行う際の手順を示します。使用している赤道儀はビクセンのSXP赤道儀です。他の赤道儀を使っている場合、個々の手順に小さな違いはあると思いますが、大まかな流れとしては変わらないと思います。
1. 望遠鏡の設置
説明書の手順に従ってコンクリートなどのしっかりした地面に赤道儀を設置し、望遠鏡を載せます。このとき、なるべく架台が水平になるよう、三脚の脚の長さを調整しておきます。赤道儀本体を載せる前に、三脚のヘッドに水準器を載せて調節するとよいでしょう。赤道儀の原理的には、足元が傾いていようがなんだろうが、極軸さえしっかり天の北極を向いていれば追尾に関しては正しく機能するのですが、その極軸合わせの際の操作性に難が出ますし、アライメントを行う際にもズレが発生しがち。力学的にも不安定になりかねないので、ここは面倒がらずにちゃんと調節した方がいいでしょう。
架台を設置したらカウンターウェイト、望遠鏡、カメラ、ガイド鏡などを載せ、極軸周りおよび赤緯周りのバランスを取ります。ここも可能な限り慎重に、きっちり合わせるべきです。
なお、極軸周りのバランスを取る際に「望遠鏡が東の空を向く場合にはウェイト側をやや重めに、西の空を向く場合は望遠鏡側をやや重めにした方がいい」(=常に東側をやや重めにする)という話があります。赤経側モーターは追尾中、基本的に東から西への一方向にのみ動きます(速度の増減はあっても逆転はしない)が、上記のように設置するとギアを西から東へと押し付ける力が常に働くので、結果としてギアがしっかりかみ合う(バックラッシュが低減される)という効果を狙ったものです。しかし、意図的にバランスを崩すにしてもその崩し方は微妙なもので、はっきりどちらかが重いと分かるほど崩してしまうのはやりすぎです。下手をすれば機器を傷めかねませんので、やる場合は十分気を付けてください。
2. 架台の設定と極軸合わせ
ここまで済んだら、電源ケーブル、ガイドケーブルなどを接続し、電源を投入します。PCで制御するタイプのオートガイダーを利用する場合の、最も簡単な接続は以下の通り。
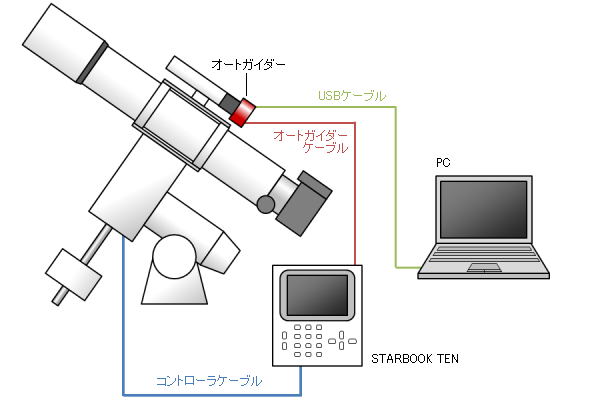
ケーブルが入り組んでいて分かりにくいかもしれませんが、オートガイダー部分に注目すると
- オートガイダーへの電源供給&データ送受信のため、USBケーブルでPCと接続
- オートガイダーからの修正信号を送信するため、専用ケーブルでSTARBOOK TENと接続
の2本が重要です。2のケーブルについては、オートガイダー側の端子の規格や赤道儀側の端子の規格によって必要なケーブルが変わってきます。間違ったケーブルで繋ぐと最悪機器の破損につながるので、不安があればオートガイダーを購入した店に相談してみてください。
ただし、オートガイドソフトとしてPHD2を用いる場合、ASCOMという仕組みを使って接続することが推奨されています。この場合、ガイドケーブルは不要になります。詳しくはこちらをご覧ください。
なお、オートガイダーを取り付ける際には、なるべくセンサーの縦横が赤緯軸、赤経軸と一致するようにします。具体的には、望遠鏡を真北の空に向けた状態(カタログでよく見かけるあの姿)で、センサーが左右に傾かないように取り付ければOKです。こうすると、赤経、赤緯方向の動きがセンサーの画素の並びと一致するので、精度が上がります。オートガイドソフトによっては、あまりに大きく傾けて取り付けるとエラーが出ることがありますし、まっすぐ取り付けるのを癖にした方がよいでしょう。
SXP赤道儀(STARBOOK TEN)の場合、電源を投入したらまず時刻と観測場所の設定を確認します。必要に応じて修正を加えてください。太陽を直接観測しないよう警告が出たのち、架台を自由に操作できる状態になるので、極軸望遠鏡のキャップを外し、赤緯軸を駆動させて極軸望遠鏡が覗ける状態にします。
そして、説明書に従い、極軸望遠鏡を使って極軸を合わせます。方位調整ネジ、高度調整ネジを使って北極星をパターンの所定の位置に入れます。設置時に三脚の水平を出していれば、この調整はやりやすいはずです。極軸合わせが済んだら、赤緯軸のクランプを緩めて望遠鏡をホームポジション(ビクセンの赤道儀の場合、真西を向いた姿勢)にし、望遠鏡を操作する「スコープモード」に入ります。
この段階で、念のため架台の設定を確認しておきます。「架台の設定」で「方向キー」の割り当てを「X-Y(赤道儀の機械座標)」に、「架台の種類」を「極軸を合わせた赤道儀」にします。また、大気差補正やPEC、バックラッシュ補正はすべてOFFにしておきます。こうしておかないと、各種の補正動作がオートガイダーからの補正信号とバッティングして追尾がかえって不安定になります。また、東の空にある天体を狙う場合、天体が子午線を越えても架台がすぐに反転しないよう、「鏡筒反転メッセージ」、「強制追尾停止」や「自動導入(東側)のパラメータを緩めておくと便利です。ただし、ここの設定によっては機材が三脚などと衝突する危険性があるので、注意が必要です。
3. アライメント
子午線を境に、撮影したい天体と同じ側にある明るい星を使ってアライメントを行います。カメラのライブビューをONにし、画面中央に対象の星が入ったらアライメントを確定します。このアライメントは、最終的に撮影対象をカメラの視野内に導入することだけが目的なので、アライメント数は1~2点で十分です。
4. ピント合わせ、光軸調整
アライメントのついでに、この明るい星を用いてピントを合わせます。私の場合、ライブビュー画像をPCに転送しているので、「ピントエイド」や「BackyardEOS」などのソフトを利用して、星像が最も小さくなるピント位置を探ります。PCを接続していない場合は、カメラの背面液晶でのライブビュー表示を拡大し、星像が最も小さくなるピント位置を目測で判断することになります。アライメントとピント合わせを1等星で行った場合は、もう少し暗い2等星などで再度ピントを確認すると、より高い精度が出せます。
また、反射系の望遠鏡(含 カタディオプトリック)を使っている場合、ついでに光軸の確認、調整もこの段階で行ってしまえば効率的です。
撮影用カメラのピント合わせと前後して、ガイド鏡の方のピント合わせも行います。PHD2を起動し、ガイドカメラの露出を開始してその取り込み画像を見ながらガイド鏡のピントを合わせます。このとき、ピントが大きく外れていると星像が見えず、星が視野内に入っていないと勘違いすることも多いので、あらかじめ昼間の風景などを使っておおまかに無限遠のピントを出しておくと、現場で迷わずに済みます。
5. 目標導入
ピント合わせとアライメントが済んだら、撮影目標を導入します。撮影目標は暗くてライブビューでは見えないことがほとんどなので、撮影用カメラの感度を一時的に上げて試し撮りをし、構図を確認します。この撮影は構図を確認することが目的なので、まだガイドはしなくて大丈夫です。撮りたい構図からずれているようなら方向を微調整し、再度試し撮り。これを繰り返して希望の構図に近づけます。
6. キャリブレーション
構図が決まったら、次にオートガイダーの「キャリブレーション」を行います。これは「信号を送ると赤道儀がどちらにどのくらい動くか」をオートガイダーに学習させるものです。PHD2を用いている場合、よほど変な設定をしない限り、マニュアルに従って操作すれば失敗することはあまりありません。
7. 撮影開始
キャリブレーションが終了すると、オートガイダーが自動的にガイドを始めます。機材のたわみやギアのかみ合わせなどの関係で、最初のうちはガイドの状況が落ち着かないことが多いので、ガイドが始まってしばらくたってから撮影を開始します。PHD2の場合、ガイドの状況はグラフで確認できるので、これがある程度落ち着いてから撮影を開始するといいでしょう。2コマ目を撮影し終わるくらいまでは監視していた方が安心ですが、それで問題なく撮影できていれば、あとはおおよそ大丈夫なはずです。
これ以降の手順に関しては、画像処理とも密接に関係してきますので、章を改めて説明します。